Mechanical Actuation
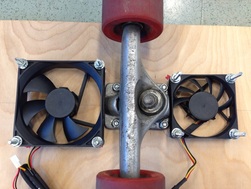 Figure 1. Vibration motors fixed to a balanced board
Figure 1. Vibration motors fixed to a balanced board
Synchroboarding has two main forms of mechanical actuation, vibration and flag actuation.
The first is a vibration motor which we made ourselves by breaking off half of the blades on a computer fan (Fig. 1). Once the fan was asymmetric, the fan would vibrate significantly when turned on. Using a computer fan allowed easy and low cost motors to be used as well as simple motor control (Fig. 2).
We used standard 220˚ rotary servos to actuate various game stage signals such as a flag that raised when the game ended. Controlling the servo was also straightforward (Fig 3.).
The first is a vibration motor which we made ourselves by breaking off half of the blades on a computer fan (Fig. 1). Once the fan was asymmetric, the fan would vibrate significantly when turned on. Using a computer fan allowed easy and low cost motors to be used as well as simple motor control (Fig. 2).
We used standard 220˚ rotary servos to actuate various game stage signals such as a flag that raised when the game ended. Controlling the servo was also straightforward (Fig 3.).
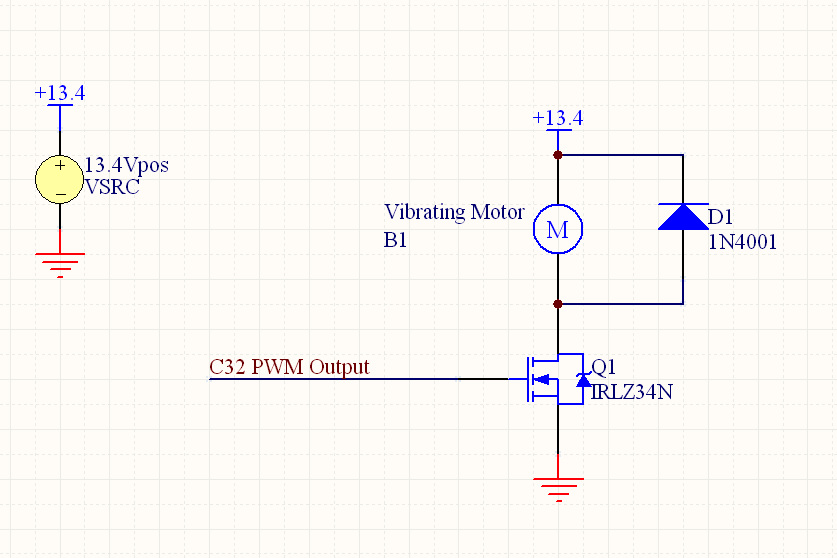
Figure 2. Vibration motor circuit schematic
|
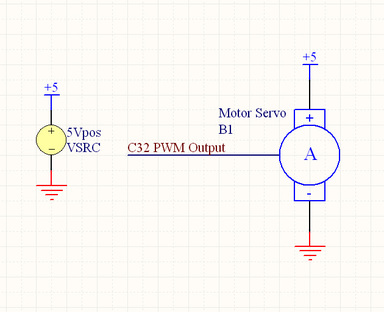
Figure 3. Rotary servo circuit schematic
|
